As a teaching associate at Cal Poly, I teach an activity section for Intermediate Dynamics. I teach junior-level mechanical engineering students how to use Matlab and Simulink to create models and solve dynamic problems numerically. I am also responsible for implementing new material for the Fall 2022 quarter where we are changing some activities to improve the learning experience for students.
For the summer of 2022, I worked as an ITS (Information Technology Services) student technician in the client services division. I was responsible for helping clients with their digital issues on an individual and large basis. I was responsible for assisting professors with technical issues with their software and computer hardware. This taught me alot about interpersonal communication with co-workers, and clients. This position is highly versatile where I was expected to learn and implement solutions in real-time with clients
At Boost Treadmills I was a Mechanical Engineering Intern that was responsible for collecting calibration data, troubleshooting mechanical issues, writing documentation, and improving the mechanical design. I worked with a small team of interns on the Cal Poly campus where Boost Treadmills held an early prototype of their newest anti-gravity treadmill to be used by the facility and collect valuable calibration data. Over the academic year, we collected calibration data from student-athletes and the general population to provide data for the weight percentage algorithm. Additionally, during this time the prototype would run into mechanical and software issues which we reported. We were responsible for solving mechanical issues and providing information for software bugs. We also were tasked with creating an installation manual, an assembly manual, and a user manual.
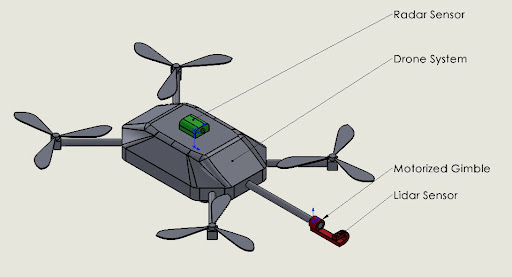
For the winter break of 2020, I worked as a research assistant for Naval Research Enterprise Internship Program (NREIP). This involved me working with a research team in Honolulu Hawaii remotely to help research possible solutions to the subterranean DARPA Grand Challenge. The challenge consisted of creating robots that can explore subterranean environments autonomously. We researched any novel technological methods that could be applied to this challenge. Our research led us to the purpose of using both lidar and radar sensors to detect obstacles and walls.
I worked at Cyber Data over the 2019 Summer break as a QA Engineering Intern. I was responsible for creating, performing, and evaluating IP 66 (water-proof) testing for their outdoor line of products. I developed a testing setup that meets the IP 66 testing standards and a consistent methodology to perform and evaluate the IP 66 tests. With these tests, I was able to determine shortcomings in the enclosure design for their products and suggest design changes to meet IP 66 standards. I would have to document my methodology of the tests, test results, and design improvements.
