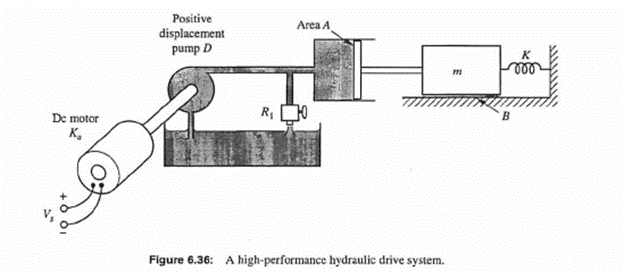
The project covers how to set up and design a state feedback controller for a hydraulic drive system to control the compressive force of a hydraulic press. The functionally of controller could be used to improve the efficiency and precision of hydraulic presses used for manufacturing and testing. The system that is being analyzed is defined from “System Dynamics: An Introduction” textbook. The system elements are being assumed to be element to implement a linear state feedback controller. The implementation of the state feedback controller allows for the defining performance of the system. This can be proved to be useful as adjusting the desire performance of the system can allow for optimal performance of the hydraulic press for any given application. The controller was able to make the unstable open loop system stable and investigating the root locus of the system showed that a PID controller wouldn’t have been able to stabilize the system. Implementation of the state-feed back controller was advantageous to stabilize and improve the systems performance.
A co-worker and I developed a Term Project for the Intermediate Dynamics Activity Course, over the 2022 fall quarter. My co-worker and I were teaching associates at the time teaching students how to use MATLAB and Simulink to solve complex kinematic and kinetic problems. The lecturer for the lecture section approached us asking us to design a new term project for the activity section as the previous one was quite well known, and many students have cheated on the assignment in the past. My co-worker and I developed a term project that would have students measure themselves on their bikes and then perform kinetic analysis using the vector-loop method. Additionally, they would perform some kinetic analysis to investigate how the length of the crank of the bike pedal affected the forces applied to the knee when biking. I developed the assignment, and then reference material and taught the term project to a class of students.

For the 2022 Fall Quarter, two other teammates and I developed the Spot Bot. The scope of this project was to develop a proof of concept of a robot that can spot someone on a bench press. The parameters of the project were that we had to develop the software/firmware using C++ and design and make our own Printed Circuit Board for the project. I mainly focused on physical design and manufacturing and PCB design and soldering. We were provided zero budget and self-purchased materials, with only 10 weeks to develop the entire project from scratch. With those parameters, we determined a simple proof of concept was our most feasible approach. That being said, our proof of concept worked in showing that our design could work.
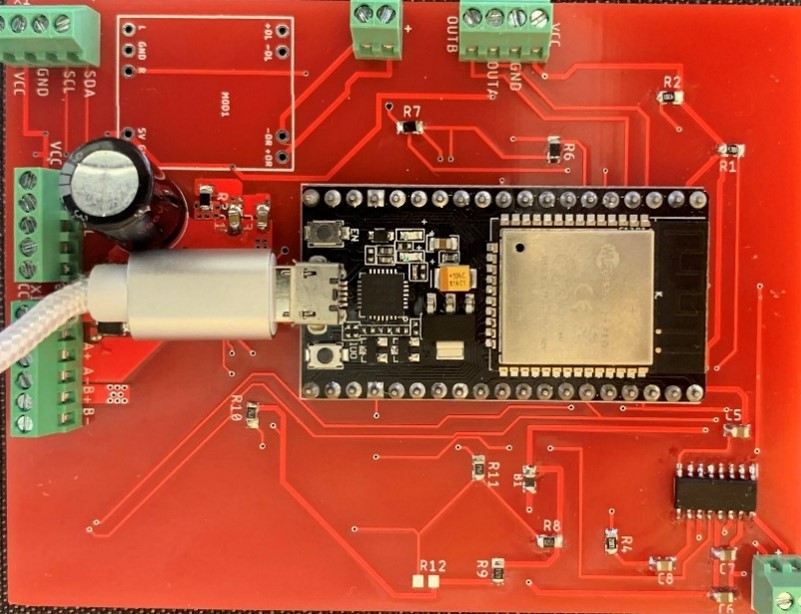
I said could because due to the short period, we experienced difficulty in the manufacturing process leading to a large strength defect in the frame that lead to our design not being able to bear a significant load. When tested with little to no load the system performed as desired and our PCB was able to read the motor encoders, and IMUs, and send bar pathing data via Bluetooth. Our PCB couldn’t control the motor directly as we had some soldering issues with our motor drive onto our PCB, but the microcontroller was able to control the motor through a motor driver on a breadboard. The overall experience taught me a lot about manufacturing basics and understanding troubleshooting and how properly scope and create a timeline for such projects.
I built this portfolio website from scratch using HTML, CSS, Javascript, and a few common libraries such as BootStrap. I have no prior experience in website development or have ever taken a class for it, but I like to teach myself new skills. I saw this as an opportunity to teach myself the basics of website development while creating a website that would be beneficial to me. Everything on the website I coded myself, using guides online and forums to troubleshoot certain issues. I learned alot about how HTML works and how it acts as a body frame for your website. I am not looking into becoming a web developer, just simply wanted to learn how the inner workings of a website function. There is no better way of learning than doing it myself. I take pride in learning new skills and learning new things that interest me or benefit me. If you want to see my source code please refer to my github page.
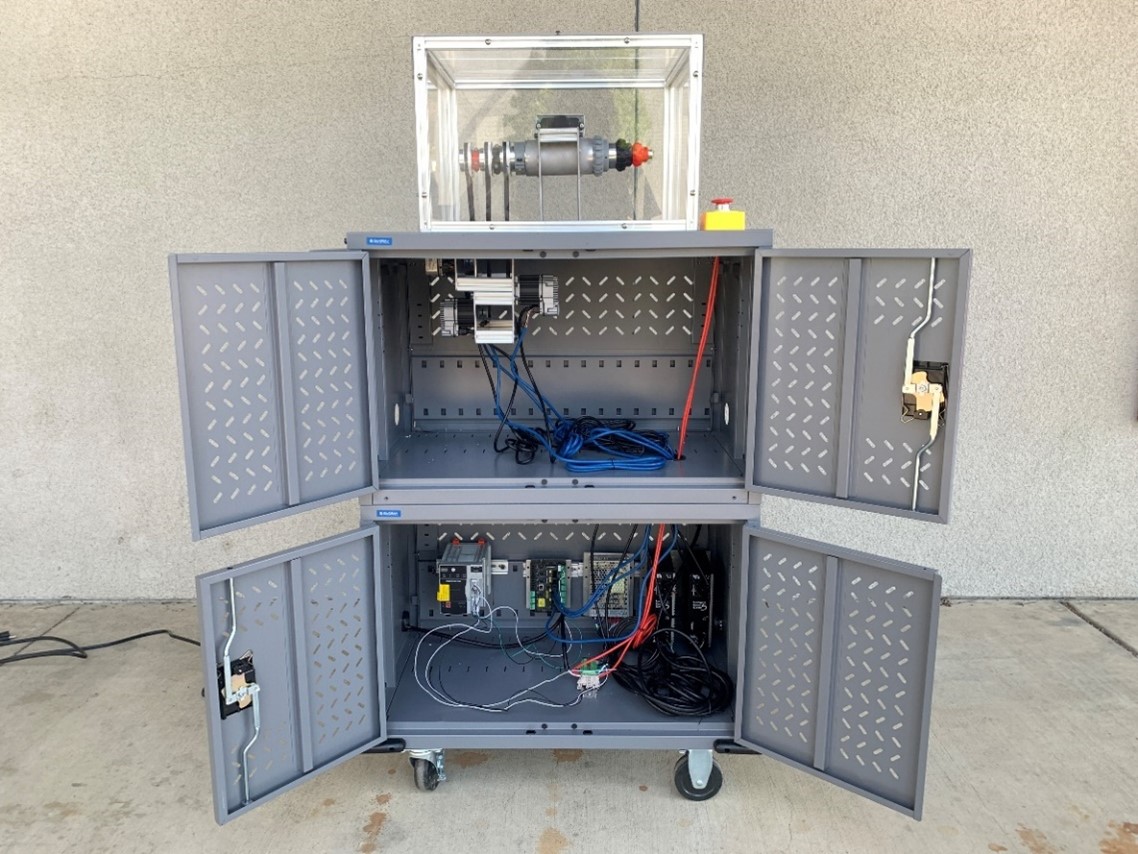
This project is my senior design project at Cal Poly, where I spent a year with three other mechanical engineering seniors on creating a triple spool turbine lab demonstration. A triple spool shaft consists of three shafts concentric concerning each other one where the smaller shafts are within the hollow larger shafts, fitted using bearings. The only companies that make these for commercial use are Rolls Royce and GE to improve the fuel efficiency and safety of commercial airline engines. For our project, we were simply making a small demonstration of how the interacting shafts operate and are controlled for a lab demonstration. The picture on the left is the final prototype we created.
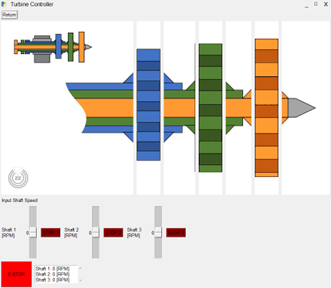
Our project consisted of using three electric motors to control the speed of each shaft via a belt drive. The motors were controlled by a Programmable Logic Controller from Rockwell Automation. My main responsibilities for this project consisted mainly of programming, electrical work, and assisting in the mechanical design decisions. Our team did not make all the progress we would have liked due to many factors. You can see the GUI I created for this project on the right, using Python. If I could go back and change anything about our design I would have switched out the PLC with a simple microcontroller and raspberry pi to fulfill our specifications. The reason I say that is because the integration of a PLC caused multiple constraints that caused delays. From this experience I learned alot about teamwork, communication, setting expectations, and managing a year-long project.
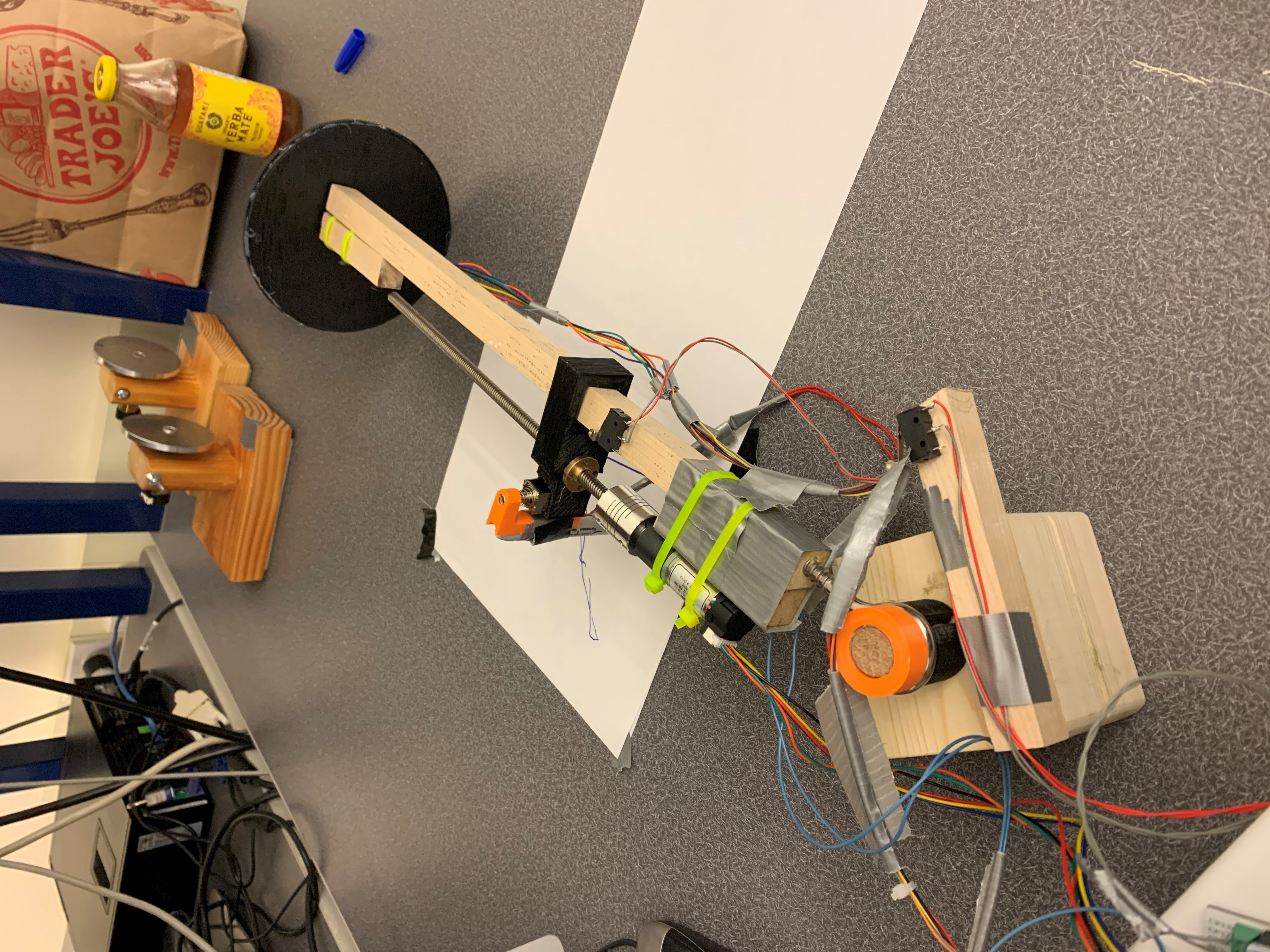
In my Mechatronics course, we were tasked with designing, building, and coding a robot that can draw an image in three weeks. This felt like an accelerated crash course on rapid prototyping where we spent only two days on the mechanical design so we could buy parts to get in before the project was due. With additional issues such as providing our budget, we kept our design at a minimal cost. Then we began programming our robot using python on a microcontroller to control two motors, 2 limit switches, and a solenoid to create a robot that could draw images. Our final design was very janky and inconsistent, but the project taught me alot about rapid prototyping, designing robotics, and rapid problem-solving. If you are interested in seeing more about this project please check out my GitHub page. For easy access use the link provided above to read more about the project.
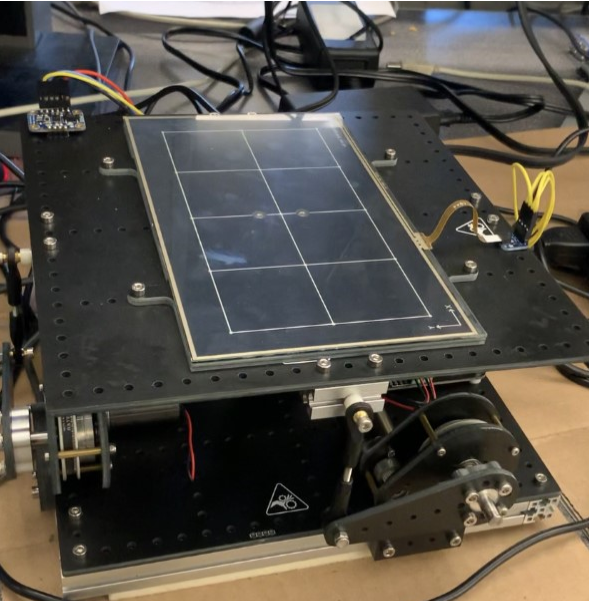
In my Introduction to Mechatronics Course, our term project was to program a robot to balance a metal ball on a flat surface. The mechanical system, sensors, and motors were entirely provided to us, but it was up to us to program the robot in such a way that it could balance a steel ball on a flat surface. This project was extremely challenging as it was my first serious mechatronics project that involved controls. Using the data from the Internal Measurement Unit (IMU) and a touch screen on the flat surface we were to perform position control of the two motors to correctly balance the ball. Using kinematics and the data we received we created a control system that would be theoretically capable of balancing the ball. One of the largest issues with this term project is that the course of the control was not a pre-requisite to this course and as a result, we were left testing different controller gain values to see which worked the best. In the end, my teammate and I programmed a robot that could properly respond to where the ball was rolling, but overcorrect and drop the ball. This project taught me so much about programming, the fundamentals of control theory, and its applications. Once I did take the course of control I felt I had a very good understanding of PID controllers effectively changing how a system would respond due to my experience in this termproject. If you want to know more about this project and other smaller projects I did in this class please check out the Doxygen website I made for this course.